Point Cloud Classification
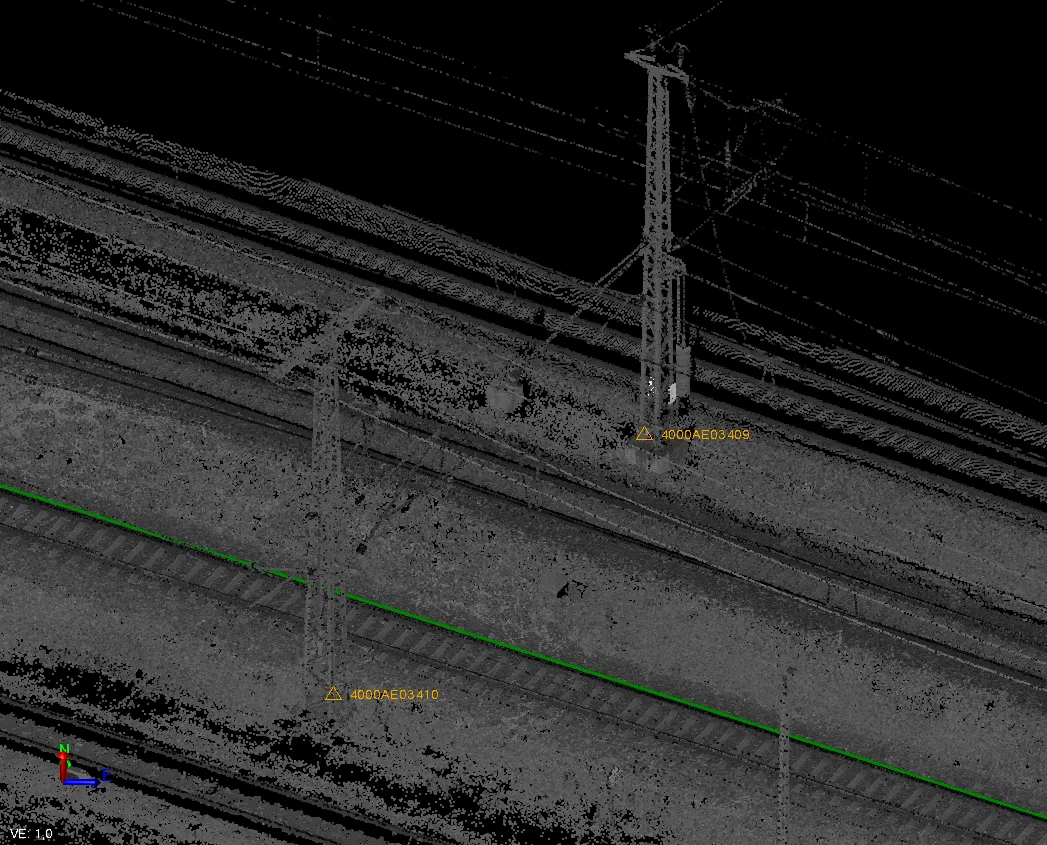
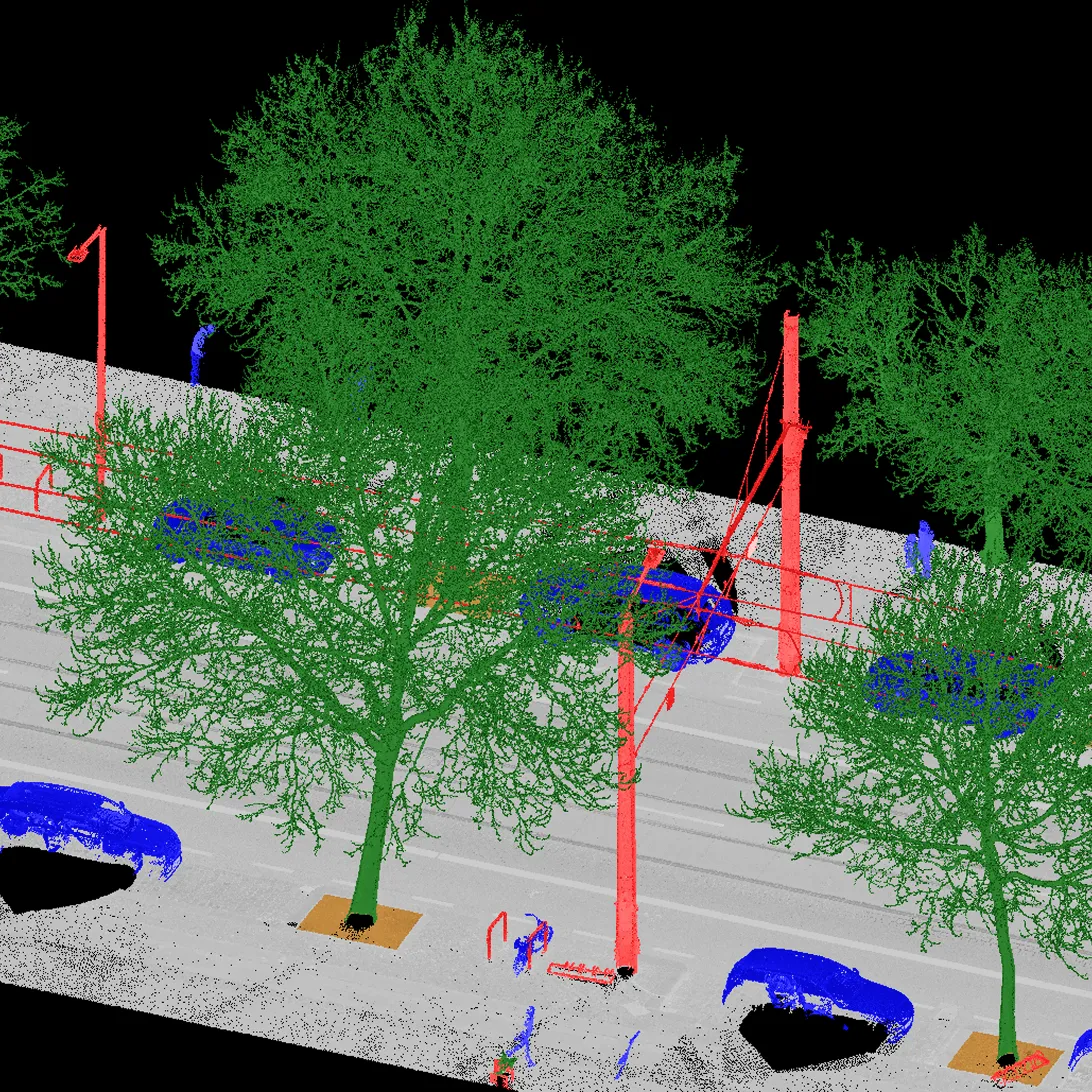
We perform structured distribution of points into defined object categories (ground, buildings, vegetation, utility networks, temporary objects, etc.). This process transforms raw data into an intelligent basis for further work.
To achieve the optimal balance of efficiency and accuracy, we apply a hybrid approach. Automated processing using specialized algorithms (in Trimble Business Center and other software) is accompanied by mandatory expert manual control and correction. We configure the classification process according to the specific project requirements and standards of European clients.
As a result, you receive a clean, structured point cloud where every object is identified. This allows for isolating layers, quickly extracting sections, performing analytics, and importing only the necessary data into a BIM or CAD environment, significantly accelerating modeling.